ПРОДУКТЫ
СПРУТКАМ РОБОТ
Универсальное ПО для оффлайн программирования промышленных роботов
Позволяет создавать траектории движения, моделировать работу робота в 3D, выполнять проверку на коллизии и генерировать управляющие программы (УП). Поддерживает различные типы роботов и технологические операции — от сварки и покраски до фрезеровки и аддитивного производства.
Промышленные роботы являются инструментом с высоким потенциалом применения.
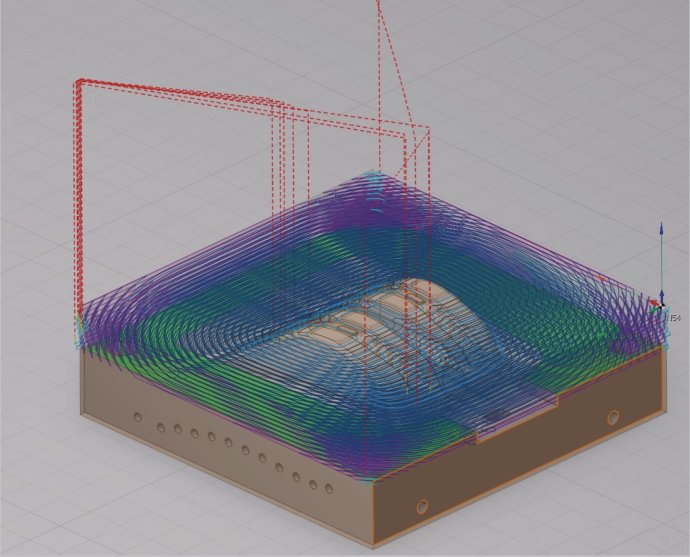
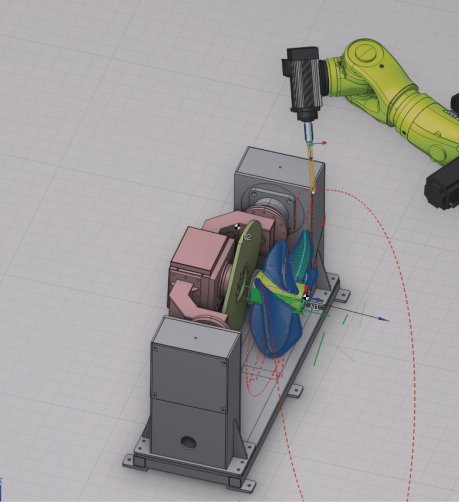
Расчет траектории
Широкий набор стратегий
Различные технологические операции — фрезерования, резки, сварки, наплавки, полировки, покраски и другие. Включает черновые, чистовые и контурные методики, а также специализированные решения для особых задач (обработка камня, сварка, термообработка, фрезерование скульптур).
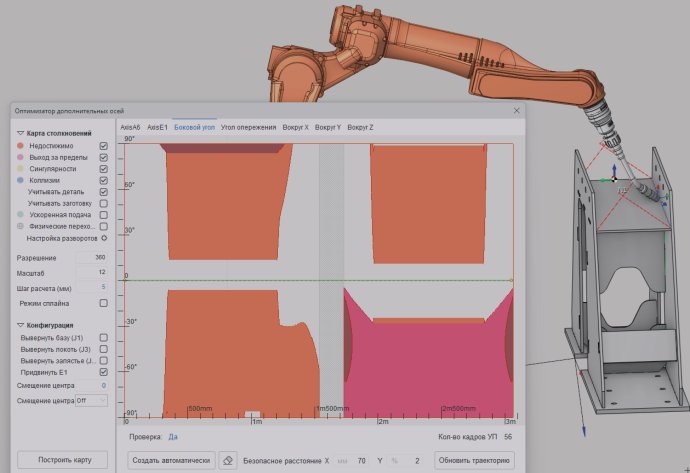
Оптимизация
Безопасное и эффективное управление роботизированными системами
С помощью карты осей анализируются зоны досягаемости, выявляются сингулярности и риски столкновений, определяются участки ускоренных и рабочих перемещений. Система позволяет автоматически рассчитывать безопасные траектории, либо вручную корректировать их в режиме реального времени с предварительным просмотром.
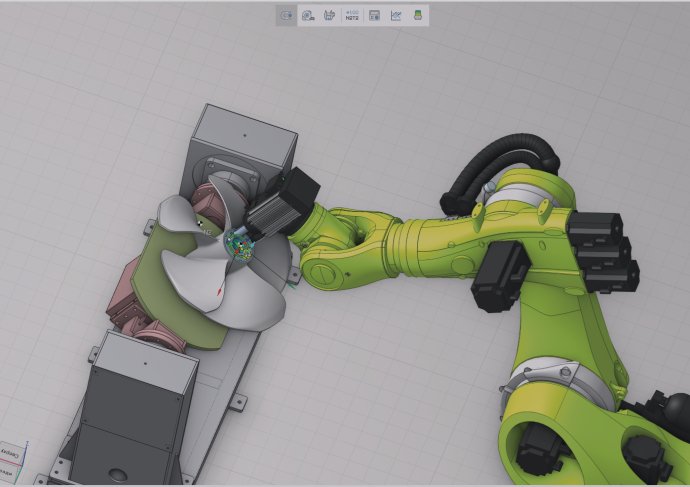
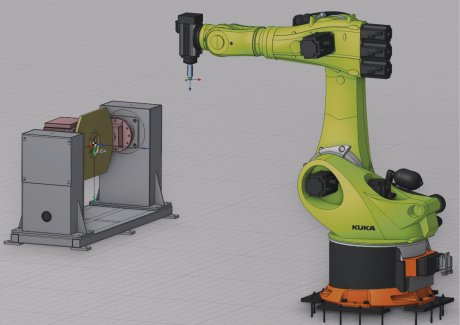
Моделирование
Визуализация роботизированной ячейки с сохранением кинематики
В симуляции участвуют робот, позиционеры, столы, рельсы, ограждения, оснастка и иная импортированная геометрия. Система поддерживает специальные режимы для моделирования технологических операций — от удаления и наплавки материала до покраски — с плавным отображением в высоком разрешении.
Верификация и запуск управляющих программ
Инструменты для подготовки и настройки
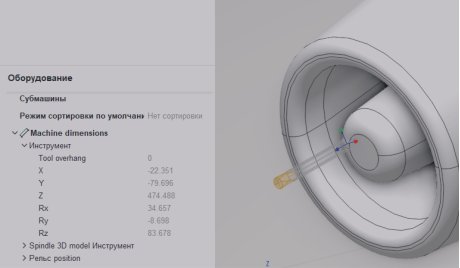
С помощью приложения «Машинмейкер» создаётся точная кинематическая модель, мобильное приложение обеспечивает калибровку TCP, а готовые постпроцессоры (Kuka, Fanuc, ABB и др.) позволяют адаптировать управляющие программы под конкретные роботы с возможностью тонкой настройки.
Позиционирование робота
Программирование робота в СПРУТКАМ РОБОТ выполняется с учетом положения робота в пространстве. Поддерживается работа, когда деталь закреплена на неподвижной оснастке и движется инструмент, так и когда деталь закреплена на роботе, а инструмент неподвижен.
Поддержка дополнительных осей
СПРУТКАМ РОБОТ поддерживает симуляцию перемещений как самого робота, так и неограниченное количество дополнительных линейных и поворотных осей позиционеров.